There are a total of five vacancies at L-CAS at the moment. Opportunities include both, PhD and PostDoc positions in robotics and computer vision. Apply now!
Month: January 2013
Paper on Facial Analysis for HRI accepted for ICRA 2013
Our joint paper with the CoR-Lab in Bielefeld has been accepted at ICRA 2013. Kudos go to Christian Lang for his excellent work.
Facial Communicative Signal Interpretation in Human-Robot Interaction by Discriminative Video Subsequence Selection
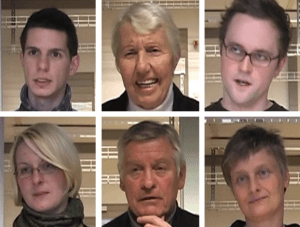
Facial communicative signals (FCSs) such as head gestures, eye gaze, and facial expressions can provide useful feedback in conversations between people and also in humanrobot interaction. This paper presents a pattern recognition approach for the interpretation of FCSs in terms of valence, based on the selection of discriminative subsequences in video data. These subsequences capture important temporal dynamics and are used as prototypical reference subsequences in a classification procedure based on dynamic time warping and feature extraction with active appearance models. Using this valence classification, the robot can discriminate positive from negative interaction situations and react accordingly. The approach is evaluated on a database containing videos of people interacting with a robot by teaching the names of several objects to it. The verbal answer of the robot is expected to elicit the display of spontaneous FCSs by the human tutor, which were classified in this work. The achieved classification accuracies are comparable to the average human recognition performance and outperformed our previous results on this task.